Giới thiệu Hình học phi Euclid
Hình học đang được giảng dạy trong nhà trường phổ thông là Hình học Euclid. Hiểu biết thêm về hình học phi-Euclid, đặc biệt là những điểm "lạ lùng" "phản trực giác"... trong Hình học này sẽ giúp chúng ta nắm chắc hơn các khái niệm và các kết quả trong hình học Euclid. Trên tinh thần đó, xin giới thiệu ở đây một số điểm sơ lược về Hình học phi Euclid.
Theo cách nhìn hiện đại, Hình học Euclid được xây dựng dựa trên các khái niệm cơ bản [điểm, đường thẳng, mặt phẳng] và các quan hệ cơ bản [nằm trên (trong), nằm gìữa, toàn đẳng (bằng nhau)] và 5 tiên đề:
1. Tồn tại một đuờng thẳng đi qua 2 điểm P và Q không trùng nhau.
2. Một đoạn thẳng AB có thể nối ra vô hạn về 2 phía.
3. Với mỗi điểm O và với mỗi điểm A không trùng O tồn tại một đường tròn tâm O bán kính OA.
4. Tất cả góc vuông đều bằng nhau.
5. Cho một đuờng thẳng l và một điểm P không thuộc l, tồn tại duy nhất một đường thẳng m đi qua P và song song với l.
Loại Hình học phát triển chỉ dựa trên 4 tiên đề đầu gọi là Hình học Tuyệt đối.
Loại hình học phát triển dựa trên 4 tiên đề đầu và phủ định của tiên đề 5 là Hình học phi Euclid (non-Euclidean Geometry). Khi phủ định tiên đề 5 ta được:
5'. Cho một đuờng thẳng l và một điểm P không thuộc l, không tồn tại đường thẳng m đi qua P và song song với l.
hoặc:
5". Cho một đuờng thẳng l và một điểm P không thuộc l, tồn tại ít nhất 2 đường thẳng m đi qua P và song song với l.
Loại hình học phát trỉển dựa trên các tiên đề 1, 2, 3, 4 và 5' là hình học spherical / elliptic (Riemann).
Loại hình học phát trỉển dựa trên các tiên đề 1, 2, 3, 4 và 5" là hình học hyperbolic (Lobachevski – Bolyai - Gauss).
Còn Hình học Euclid là hình học parabolic).
I. Hình học cầu (Spherical) - Mô hình Riemann:
Xét mặt cầu Σ tâm O, bán kính là R. Trong mô hình Riemann, Σ được xem là mặt phẳng, điểm là tất cả những điểm Euclid trên Σ, đường thẳng là đường tròn lớn của Σ.
Với cách hiểu điểm, đường thẳng và mặt phẳng như trên, ta có thể dùng Hình học Euclid để kiểm chứng mô hình Riemann hoàn toàn thoả 4 tiên đề đầu. Đối với tiên đề 2, ‘nối ra vô hạn’ tức có thể quay vòng quanh mặt cầu vô hạn lần (không có gì trái với nội dung của tiên đề này, dĩ nhiên khái niệm “điểm nằm giữa 2 điểm khác” cần phải điều chỉnh).
Dễ thấy tiên đề 5 không còn đúng nữa: không tồn tại đường thẳng nào đi qua 1 điểm ngoài 1 đường thẳng cho sẵn và song song với đường thẳng đó (2 đường tròn lớn bao giờ cũng có 2 điểm chung – 2 mặt phẳng chứa 2 đuờng tròn lớn có điểm chung là tâm của mặt cầu).
Khoảng cách d(A,B) giữa 2 điểm A và B là độ dài cung tròn AB trên đường tròn lớn:
d(A,B) = R.α (α là số đo góc AOB tính bằng radian).
Dù với định nghĩa khoảng cách mới, đuờng tròn Riemann cũng vẫn là đường tròn Euclid.
Góc của 2 đường thẳng là góc của 2 đường tròn lớn [góc của 2 tiếp tuyến tại giao điểm (= góc phẳng của nhị diện tạo bởi 2 mặt phẳng chứa 2 đường tròn lớn)]
Trong mô hình này đa giác có số cạnh nhỏ nhất không phải là tam giác mà là nhị giác (biangle) hay (vỏ) múi cầu, còn tổng 3 góc trong tam giác ABC lớn hơn 180°.
Gọi α, β và γ là số đo (tính bằn radian) của các góc trong tam giác ABC ta có
α + β + γ = π + dt(ΔABC)/R² (định lí Gerard)
Ví dụ: tam giác ABC trong hình sau (AB là kinh tuyến 0°, AC là kinh tuyến 90° và BC là xích đạo) có tổng số 3 góc bằng 270º
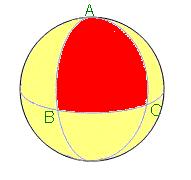
Từ công thức Gerard dễ thấy khi tam giác ABC có kích thước vừa phải và bán kính mặt cầu R thật lớn thì tổng 3 góc của tam giác rất gần 180°.
II. Hình học Hyperbolic:
0. Mô hình Đĩa Poincaré đơn giản:
Xét đuờng tròn C trong mặt phẳng Euclid, không mất tính tổng quát có thể chọn bán kính bằng 1. Gọi Ω là đĩa tròn mở xác định bởi C (không chứa các điềm trên đường tròn biên C). Trong mô hình Poincaré, Ω được coi là mặt phẳng, còn điểm là tất cả những điểm Euclid trong Ω. Đường thẳng là các dây cung (không kể 2 đầu mút) của đường tròn C.
Với cách hiểu điểm, đường thẳng, mặt phẳng như trên, dễ thấy tiên đề 5 không còn thoà mãn. Xem hình vẽ dưới đây:
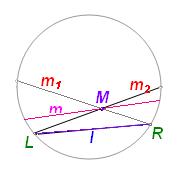
Trong hình vẽ này, tất cả các đuờng thẳng m nằm trong góc tạo bởi m1 và m2 (kể cả m1 và m2) đều song song với l. Có người đề nghị nói là m1 song song phía phải với l, m2 song song phía trái với l. L và R có thể xem như các điểm ở vô tận [nếu hiểu 2 đường thẳng song song nhau là 2 đường thẳng gặp nhau ở vô tận (∞)].
Dĩ nhiên, đây chỉ là một mô hình đơn giản nhằm cho thấy tiên đề 5 không phải bao giờ cũng "hiển nhiên", nên nếu không có những điều chỉnh thích hợp về định nghĩa khoảng cách thì tiên đề 3 (về đường tròn) chưa được thoả trong mô hình này.
1. Mô hình Đĩa Poincaré:
Xét đuờng tròn C trong mặt phẳng Euclid, không mất tính tổng quát có thể chọn bán kính bằng 1. Gọi Ω là đĩa tròn mở xác định bởi C (không chứa các điểm trên đường tròn biên C). Trong mô hình Poincaré, Ω được coi là mặt phẳng, còn điểm là tất cả những điểm Euclid trong Ω.
Đường thẳng là phần trong Ω của
(i) một đường kính của C, hoặc
(ii) một đường tròn vuông góc (trực giao) với C (2 tiếp tuyến tại mỗi giao điểm của C và đường tròn đó vuông góc nhau).
Với cách hiểu điểm đường thẳng và mặt phẳng như thế ta có thể kiểm chứng bằng Hình học Euclid rằng tiên đề “ tồn tại duy nhất một đường thẳng đi qua 2 điểm phân biệt” vẫn còn thoả mản [có thể chứng minh điều này khá dễ dàng bằng Hình học Giải tích (toạ độ)].
Tiên đề “mỗi đoạn thẳng có thể kéo ra một cách vô hạn về cả 2 phía” cũng thoả mãn do Ω là một đĩa mở (lưu ý là [i]khi nói tới một đường vô hạn ta thường nghĩ rằng nó có thể ‘kéo dài ra’ mãi mãi, thật ra phải hiểu đường vô hạn là đường ‘không có điểm mút’. ‘Vô hạn’ và ‘không có điểm mút’ không có cùng một nghĩa )…
Định nghĩa về 2 đường thẳng song song hoàn toàn tương tự như cũ (không có điểm chung). Tuy nhiên, có thể kiểm chứng được rằng tiên đề song song không còn thoả mãn nữa và các định lí mà chứng minh phải sử dụng tiên đề này cũng không còn đúng nữa (chẳng hạn 2 đường thẳng cùng song song đường thẳng thứ ba thì chưa hẳn song song nhau…). Tiên đề song song phải chỉnh lại thành: Qua một điểm M không nằm trên đường thẳng a tồn tại ít nhất hai đường thẳng song song với a.
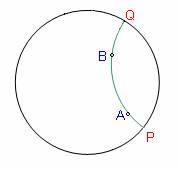
Ta cũng thể chứng minh tồn tại vô số đường thẳng song song với l chứ không phải chỉ có 2 đường như trong tiên đề, xem minh hoạ duới đây:

Trong hình vẽ trên, tất cả các đưòng thẳng m qua M nằm trong góc xác định bởi m1 và m2 (kể cà m1 và m2) đều song song với a.
Cho 2 điểm A và B trong mặt phẳng Ω, hai đỉểm này xác định duy nhất một đường thẳng (phần đường kính hoặc cung tròn trong Ω) và đường thẳng này sẽ ‘tiếp cận’ C tại 2 điểm P và Q .
Khoảng cách d(A,B) giữa 2 đìểm AB này được định nghĩa như sau:
d(A,B) =| ln(AP:AQ/BP:BQ)|
với AP, AQ, BP và BQ là các khoảng cách theo nghĩa trong Hình học Euclid, và ln là logarithm tự nhiên.
[Có thể kiểm chứng định nghĩa trên không phụ thuộc việc gọi tên 2 điểm P và Q, và cũng thoả mản các yêu cầu của định nghĩa về khoảng cách: d(A,A) = 0, d(A,B) = d(B,A) và d(A,C) ≤ d(A,B) + d(B,C)]
Từ định nghĩa khoảng cách này ta có thể định nghĩa đuờng tròn hoàn toàn tương tự như trong định nghĩa trong Hình học Euclid.
Số đo góc của 2 đuờng thẳng trong hình học này là số đo góc của 2 đường cong (góc tạo bởi 2 tiếp tuyến của 2 đuờng cong tại điểm chung) hoặc của đuờng thẳng với đuờng cong theo Hình học Euclid (góc tạo bởi tiếp tuyến của đường cong tại điểm chung với đường thẳng)

Tam giác cũng định nghĩa tương tự như cũ. Tuy nhiên ở đây, tổng của 3 góc trong tam giác không quá 180°
2. Mô hình nửa mặt phẳng trên:
Cho một đường thẳng XY trong mặt phẳng Euclid, không mất tính tổng quát có thể giả sử XY là một đuờng thẳng nằm ngang (trục hoành). Gọi Ψ là nửa mặt phẳng mở trên (không chứa các đìểm trên đường thẳng XY). Trong mô hình mới này Ψ được coi là mặt phẳng.
Điểm là tất cả những điểm Euclid trong Ψ.
Đường thẳng là phần nằm trong Ψ của
(i) bất kì đường tròn có tâm trên XY, hoặc
(ii) bất kì đường thẳng vuông góc với XY.
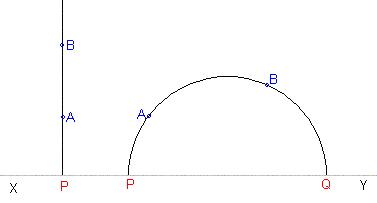
Cho 2 điểm A và B trong mặt phẳng Ψ, tồn tại duy nhất một đường thẳng đi qua A và B
(ii) nếu đường thẳng AB vuông góc với XY, gọi giao điểm của chúng là P;
(iii) nếu đường thẳng này là nửa đường tròn mở, gọi giao điểm của đường tròn tương ứng và XY là P và Q.
Khoảng cách d(A,B) của 2 điểm A và B được định nghĩa như sau:
• d(A,B) = |ln(PA/PB)| cho trường hợp (i) hoặc
• d(A,B) = |ln(PA:QA/PB:QB)| cho trường hợp (ii)
Đường tròn và số đo của góc định nghĩa tương tự như trong mô hình Poincaré.
Mọi kết quả tìm đươc trong mô hình Poincaré cũng đúng cho mô hình nửa mặt phẳng trên này.
Thật ra mô hình này là một trường hợp đặc biệt của mô hình Poincaré (xem đường thẳng XY như là đường tròn có tâm ở vô tận).
Không có nhận xét nào:
Đăng nhận xét